아두콥터의 모드(아두콥터의 기능)
아두파일럿을 이해하기 위해서는 비행 모드들에 대해서 이해해야 한다. 아두콥터에는 다양한 모드들이 있는데, 아두콥터는 이 모드에 따라 stablization, 자동 비행 등의 행동을 결정한다. 아두콥터의 비행 모드는 Radio(조종기), Ground Station 의 Command 등에 의해 컨트롤된다.
아두콥터에는 십여개의 모드가 있는데, 일반적인 상황에서 쓰이는 모드는 9개 남짓이다. 이 포스팅에서는 일반적으로 다루게 될 모드들에 대해서만 소개하였다.
아두콥터의 모드들
| 모드 이름 | GPS Dependency |
|---|---|
| Loiter | O |
| RTL(Return To Launch) | O |
| Auto | O |
| Guided | O |
| Drift | O |
| Pos Hold | O |
| Circle | O |
| Throw | O |
| Stablize | X |
| Alt Hold | X |
| Acro | X |
| Sport | X |
| Land | X |
Stablize
Stablize 모드는 아두콥터의 기본 모드인데, 드론을 직접 조종할 때 쓰게 된다. Stablize 모드는 드론의 수평을 맟춰 주고 이동 중 현재 방향을 유지시켜 주며, 파일럿(조종하는 사람) 이 Throttle 을 완전히 제어할 수 있게 해준다.
Alt Hold

Alt Hold (Altitude Hold Mode) 는 yaw, pitch, roll 동작을 허용하면서 드론 고도를 일정하게 유지시키는 것이 목적이다.
RTL
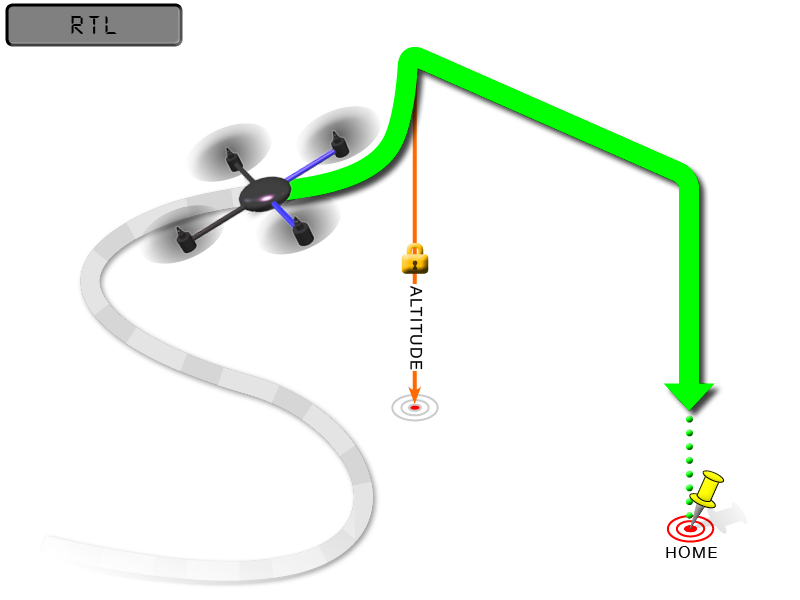
RTL (Return To Launch) 모드에 진입하면, 드론은 HOME 으로 귀환한다. 15미터 미만이라면, 안전을 위해 15미터까지 상승 후 이동한다. 특별한 설정이 없는 이상 일반적으로 이륙 전 모터가 ARM 된 위치가 HOME 이 된다.
보통 조종기 혹은 GCS 와 연결이 끊겼을 때 자동으로 Failsafe (안전장치) 에 의해 이 모드가 자동으로 실행된다.
Auto
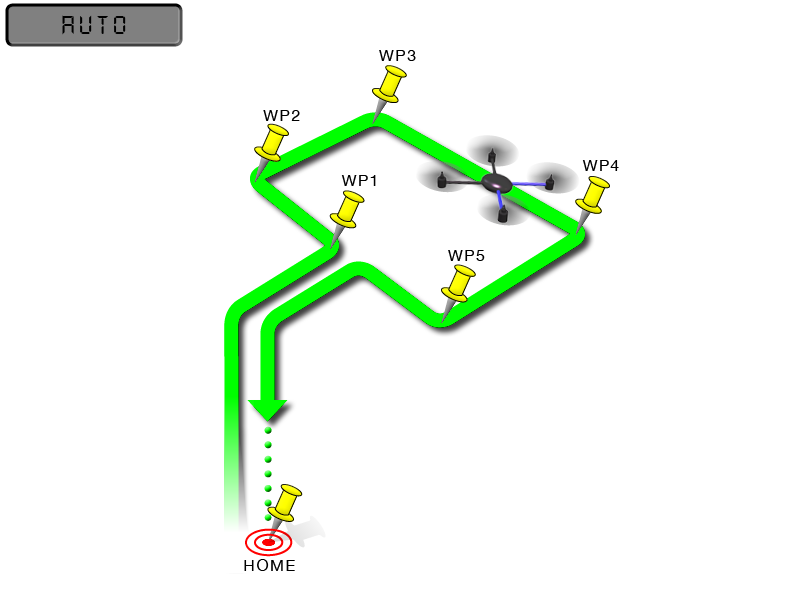
Auto 모드에서는 드론은 Mission Planner, APM Planner 2 등의 프로그램을 이용하여 사전에 전달받은 Mission Script 대로 행동한다. 드론에게 설정해 줄 수 있는 명령은 대표적으로 Takeoff, Waypoint, spin 등이다.
Guided
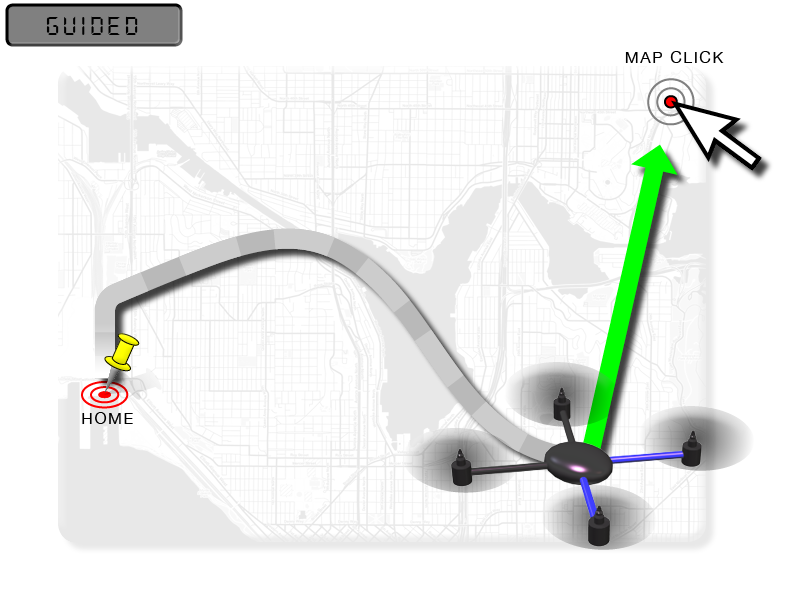
Guided 모드는 Ground Station (Mission Planner) 혹은 Dronekit 등을 이용한 어플리케이션의 명령을 받아 행동하는 모드이다. 드론 관련 어플리케이션을 제작하는 사람들에겐 이 모드가 가장 유용하게 쓰일 것이다.
외부로부터 이동 명령을 전달 받으면, 해당 위치로 이동한 후 다음 명령을 받을 때 까지 Hover 하며 기다린다.
참고문헌
http://www.arducopter.co.uk/all-arducopter-guides/arducopter-flight-modes
이미지 출처
http://ardupilot.org/copter/docs/flight-modes.html
다른 모드들에 대해서도 궁금하다면 위 문서를 보길 바란다.
'Dev > Drone' 카테고리의 다른 글
| [ardupilot][SITL] SITL(3) : 실행 및 파라미터 (0) | 2017.02.10 |
|---|---|
| [ardupilot][SITL] SITL(2) : 시뮬레이터 설치 (0) | 2017.02.06 |
| [ardupilot] 아두파일럿 소스 분석(2) : 개요 (2) | 2017.02.03 |
| [ardupilot] 아두파일럿 소스 분석(1) : 사전 준비 (0) | 2017.02.03 |
| [ardupilot][SITL] SITL(1) : 개요 (1) | 2016.12.23 |
