SITL(3) : 실행 및 파라미터
GUIDED 모드
이전 글에서 SITL 을 성공적으로 설치했다면 이번에는 시뮬레이터 속의 드론을 비행시켜 보자.
ardupilot/ArduCopter으로 이동한 후에 아래 명령어를 입력한다.
sim_vehicle.py -w --map --console

위와 같은 화면 구성이 보일 것이다. 명령어를 실행시켰던 기존 콘솔에서 동작하는 프로세스가
MAVProxy 이다. MAVProxy 에 아래와 같이 명령어를 입력해 보자.
- 모드를
GUIDED로 설정한다.
mode GUIDED
- 모터를 ARM 시킨다.
arm throttleARM 은 아두파일럿에서 '시동' 과 비슷한 의미라고 생각해 두면 좋다.
- 이륙시켜 보자.
takeoff 100
console 에서 altitude 가 20 이 될 때까지 드론이 움직이는 모습을 볼 수 있다.
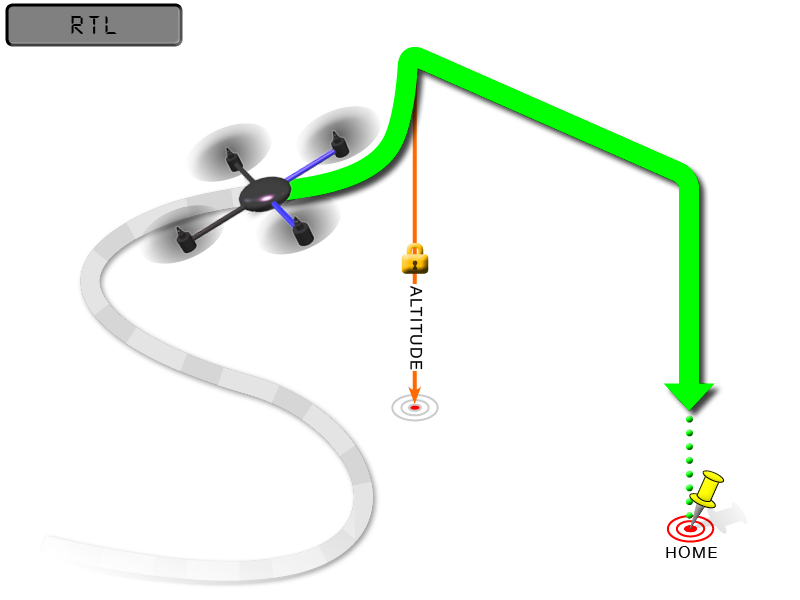
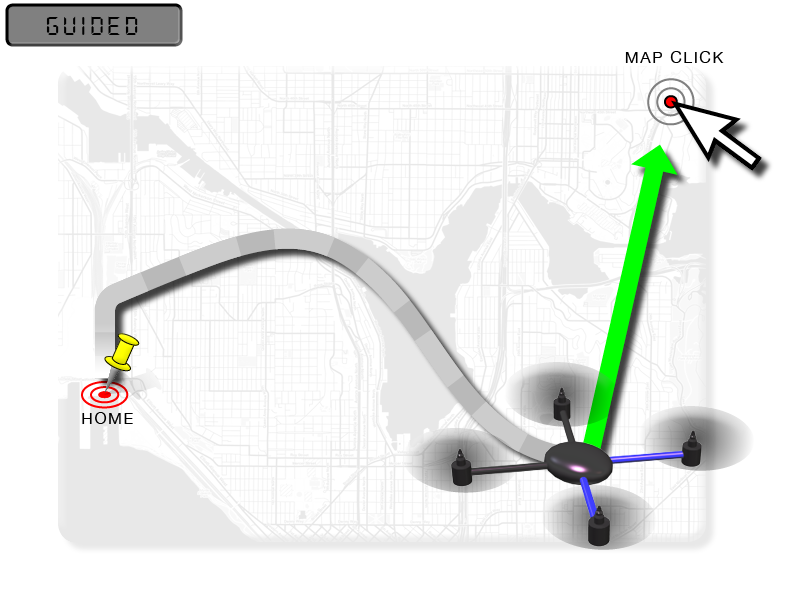
- GUIDED 모드는 GCS 에서의 즉각적인 명령에 따르는 모드이다. MAP 위에서 명령을 날려서 원하는 위치로 날려보자.

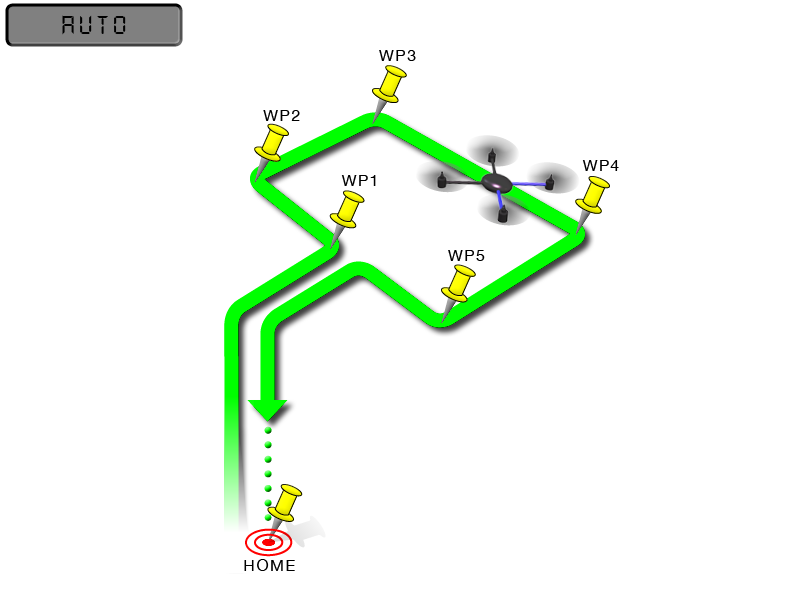
Auto 모드
ardupilot 의 mission 기반 자동 비행 기능으로, 'Autopilot' 이름값을 하는 모드이다. SITL 을 실행하고 MAVProxy 에 아래와 같은 명령어를 입력해 보자.
미리 설정된 waypoint 들을 전송
wp load ../Tools/autotest/copter_mission.txt

위와 같이 map 에 waypoint 가 보일 것이다. 먼저 이륙을 시켜보자.
mode guided arm throttle takeoff 20이륙 후에 모드를 Auto 로 변경하면, waypoint 를 따라서 비행이 시작된다.
mode auto
sim_vehicle.py
sim_vehicle.py 는 아두파일럿의 빌드와 코드의 실행을 자동으로 Simulating & Testing 할 수 있는 스크립트이다.
아레는
sim_vehicle.py -h
을 실행했을 때 볼 수 있는 파라미터들에 대한 설명이다.
Options:
-h, --help show this help message and exit
-v VEHICLE, --vehicle=VEHICLE
vehicle type (ArduPlane, ArduCopter or APMrover2)
-f FRAME, --frame=FRAME
set aircraft frame type for
copters can choose +, X, quad or octa
for planes can choose elevon or vtail
-C, --sim_vehicle_sh_compatible
be compatible with the way sim_vehicle.sh works; make
this the first option
-H, --hil start HIL
Build options:
-N, --no-rebuild don't rebuild before starting ardupilot
-D, --debug build with debugging
-c, --clean do a make clean before building
-j JOBS, --jobs=JOBS
number of processors to use during build (default for
waf : number of processor, for make : 1)
-b BUILD_TARGET, --build-target=BUILD_TARGET
override SITL build target
-s BUILD_SYSTEM, --build-system=BUILD_SYSTEM
build system to use
--rebuild-on-failure
if build fails, do not clean and rebuild
--waf-configure-arg=WAF_CONFIGURE_ARGS
extra arguments to pass to waf in its configure step
--waf-build-arg=WAF_BUILD_ARGS
extra arguments to pass to waf in its build step
Simulation options:
-I INSTANCE, --instance=INSTANCE
instance of simulator
-V, --valgrind enable valgrind for memory access checking (very
slow!)
-T, --tracker start an antenna tracker instance
-A SITL_INSTANCE_ARGS, --sitl-instance-args=SITL_INSTANCE_ARGS
pass arguments to SITL instance
-G, --gdb use gdb for debugging ardupilot
-g, --gdb-stopped use gdb for debugging ardupilot (no auto-start)
-d DELAY_START, --delay-start=DELAY_START
delays the start of mavproxy by the number of seconds
-B BREAKPOINT, --breakpoint=BREAKPOINT
add a breakpoint at given location in debugger
-M, --mavlink-gimbal
enable MAVLink gimbal
-L LOCATION, --location=LOCATION
select start location from
Tools/autotest/locations.txt
-l CUSTOM_LOCATION, --custom-location=CUSTOM_LOCATION
set custom start location
-S SPEEDUP, --speedup=SPEEDUP
set simulation speedup (1 for wall clock time)
-t TRACKER_LOCATION, --tracker-location=TRACKER_LOCATION
set antenna tracker start location
-w, --wipe-eeprom wipe EEPROM and reload parameters
-m MAVPROXY_ARGS, --mavproxy-args=MAVPROXY_ARGS
additional arguments to pass to mavproxy.py
--strace strace the ArduPilot binary
--model=MODEL Override simulation model to use
Compatibility MAVProxy options (consider using --mavproxy-args instead):
--out=OUT create an additional mavlink output
--map load map module on startup
--console load console module on startup
대부분 default 로 놓아도 문제가 없지만, 중요한 파라미터는 다음과 같다.
- --out : MAVProxy 에게 적용되는 파라미터로써, SITL 상에서 존재하는 드론과 연결할 GCS 혹은 다른 Application 의 Address 가 오면 된다.
- --map : Vehicle 의 위치에 대한(GPS 좌표 기반) 지도를 표시한다. 이 화면을 이용하여 GUIDED 모드의 기능을 테스트하고 Vehicle 의 행동을 그래픽으로 대강이나마 관찰할 수 있다.
- --console : Vehicle 에 대한 정보를 볼 수 있는 콘솔을 추가로 연다. 그렇지 않으면 기존 터미널에 출력된다.
- -G --gdb : 디버깅 옵션을 추가한다.
- -w --wipe-eeprom : eeprom (드론의 보조 기억장치) 를 지우고 시작한다. 사전에 설정된 Mission 등등이 삭제된다.
참고문헌
http://ardupilot.org/dev/docs/copter-sitl-mavproxy-tutorial.html
'Dev > Drone' 카테고리의 다른 글
| [ardupilot][SITL] SITL(2) : 시뮬레이터 설치 (0) | 2017.02.06 |
|---|---|
| [ardupilot] 아두콥터의 모드(아두콥터의 기능) (0) | 2017.02.06 |
| [ardupilot] 아두파일럿 소스 분석(2) : 개요 (2) | 2017.02.03 |
| [ardupilot] 아두파일럿 소스 분석(1) : 사전 준비 (0) | 2017.02.03 |
| [ardupilot][SITL] SITL(1) : 개요 (1) | 2016.12.23 |






 [SITL 이 실행되는 모습]
[SITL 이 실행되는 모습]
 {: .center-image}
[드론에게 위와 같이 waypoint 를 가지는 mission 을 설정할 수 있다.]
{: .center-image}
[드론에게 위와 같이 waypoint 를 가지는 mission 을 설정할 수 있다.] [드론을 이용하여 제작된 3D 이미지]
[드론을 이용하여 제작된 3D 이미지]