
아두파일럿 이란?
아두파일럿은 아두이노 + Autopilot 의 줄임말으로, 다양한 하드웨어 환경의 Vehicle 에 탑재될 수 있는 오픈소스 autopilot system 이다.(대표적으로 Quad Copter 에는 ArduCopter 가 들어간다.) 일반적으로 드론에게 기대할 수 있는 기능들을 제공하며, 눈여겨 볼 만한 특징으로는 GPS 기반으로 미션을 설정하여 자동 비행을 할 수 있다는 점이다. 이를 응용하면 다양한 활용 방안을 생각해 볼 수 있다. 대표적으로 공식 홈페이지의 Use Case & Application 을 살펴보면 아래와 같은 mission 을 수행하며 촬영한 카메라로 3D Mapping 을 하는데에 활용되는 모습을 볼 수 있다.
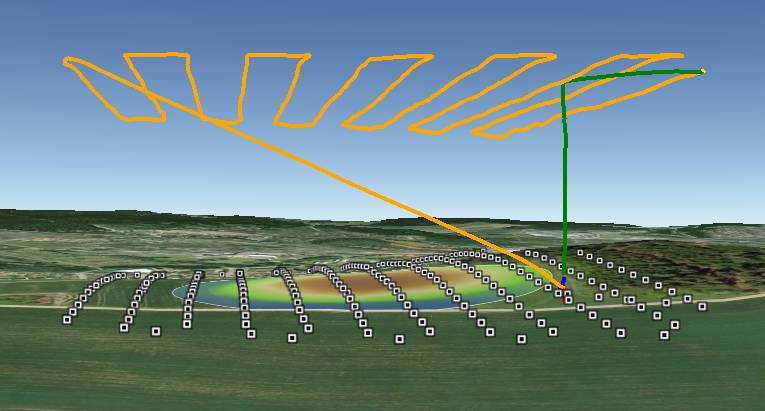 {: .center-image}
[드론에게 위와 같이 waypoint 를 가지는 mission 을 설정할 수 있다.]
{: .center-image}
[드론에게 위와 같이 waypoint 를 가지는 mission 을 설정할 수 있다.]
 [드론을 이용하여 제작된 3D 이미지]
[드론을 이용하여 제작된 3D 이미지]
공식 홈페이지에서는 아두파일럿에 대해 친절하게 설명되어 있다.
최근 들어 드론의 활용에 관한 연구와 개발이 많이 이루어 지는데 오픈소스인 Ardupilot 을 이용하는 경우가 많다. (어른의 사정) 나는 아두파일럿을 공부하는데에 자료가 풍족하지 않아 공부하는데에 고생을 했다. 그렇다. 그래서 이 포스팅에 공부한 내용을 정리하기로 했다.
이 포스팅에서는 아두파일럿의 대표적인 하위 프로젝트인 아두 콥터에 대해서 살펴본다.
아두파일럿을 공부하기에 앞서, 아두파일럿이 탑재된 드론이 있다면 가지고 충분히 조작해 보고 관찰하기를 바란다. 어느 분야나 그렇듯이, 코드를 분석하기 위해서는 코드의 동작을 먼저 관찰하는 것이 이해에 수월하다.
이 포스팅은 공식 사이트의 wiki 를 참고하였다.
'Dev > Drone' 카테고리의 다른 글
| [ardupilot][SITL] SITL(2) : 시뮬레이터 설치 (0) | 2017.02.06 |
|---|---|
| [ardupilot] 아두콥터의 모드(아두콥터의 기능) (0) | 2017.02.06 |
| [ardupilot] 아두파일럿 소스 분석(2) : 개요 (2) | 2017.02.03 |
| [ardupilot] 아두파일럿 소스 분석(1) : 사전 준비 (0) | 2017.02.03 |
| [ardupilot][SITL] SITL(1) : 개요 (1) | 2016.12.23 |
